

超音波モータとは (原理と特徴)
超音波モータと一般的なモータとの違い

一般的なモータは、コイルに電流が流れると、その周囲に磁界が発生します。この磁界と磁石の間には、同じ磁極同士では反発力が働き、異なる磁極同士では引き合う力が作用します。モータは、この原理を利用して、電流による磁界と磁石との相互作用によって回転運動をおこしています。回転運動をおこすために電磁力を利用しているため高電圧、磁場環境ではモータに異常が発生し、使用することが出来ません。また、電源を切った状態では、中心軸は自由に回転してしまい、姿勢を保持することが出来ません。
この問題を解決することができるのが超音波モータです。回転原理に電磁力を利用しない超音波モータの特徴についてご案内します。


技術・開発情報





総合カタログはこちら
超音波モータ

Piezo Sonicの製品資料やカタログはこちらのページからお取り寄せ可能です。

DCモータ
ステッピングモータ


一般的なモータ
電源OFF
姿勢が保てない

高電圧、磁場環境

正常に動作できない
姿勢が保てる
電源OFF
超音波モータ
高電圧、磁場環境
正常に動作できる

CADデータはこちら
Piezo Sonicの製品のCADデータはこちらのページからお取り寄せ可能です。

電話でのお問い合わせ
03-6379-6020
営業時間
10 : 00~18 : 00
(土日祝 休み)
お問い合わせはこちらから
Piezo Sonic の超音波モータ

製品に関するご質問やお見積り、各種ご相談はお問い合わせフォームをご活用ください。

Piezo Sonicではモータとロボティクスを融合させた応用製品の開発に取りんでいます。
ロボット開発、コンサルティング開発サービス事業ページはこちら
ロボット開発事業のご紹介
回転エネルギーの生成にコイルや磁石を利用せず、電圧を加えると変形する圧電セラミックを利用しています。 圧電セラミックの変形量をステータと呼ばれる金属部位で増幅し、その変形をコントロールすることでステータ表面で回転運動を生み出します。 この回転運動はステータに押しつけているロータに摩擦力によって伝達され、ロータが回転します。シャフトはこのロータに固定されていて、モータのトルク、回転を外部に伝えます。 この摩擦力は常時発生しているため、非通電・非制御でも位置を保つことができ(高保持力)、バックラッシュのないダイレクトドライブを実現することができます。

従来の超音波モータは同サイズの電磁力で回転するモータ(DCモータ等)と比べて高トルクですが、寿命が1/10程度と短いことが課題となっていました。 Piezo Sonic製 超音波モータ:ピエゾソニック モータは構造と素材を見直すことにより、同サイズの従来の超音波モータと比べ2倍以上の長寿命化に成功し、ステッピングモータ並みの長寿を実現しました。 また、大幅な高トルク化もあわせて実現しています。 (特許取得済、2018年精密工学会「ものづくり賞」受賞・2019年「グッドデザイン賞」受賞 )

超音波モータの特徴

DCモータ
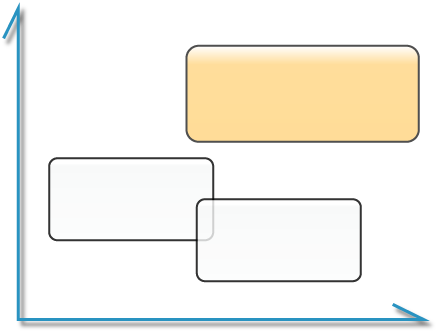
同サイズの超音波モータ、DCモータ、ステッピングモータのトルクと回転数の関係にフォーカスした領域図です。
超音波モータは他のモータに比べ、低速・高トルクという特徴を持ちます。
摩擦力により非制御時でも高保持力を維持でき、バックラッシュもないため、ギアを使わないダイレクトドライブのアクチュエータシステムを構築することが可能です。
ステッピング
モータ
超音波モータ
同サイズの超音波モータ、DCモータ、ステッピングモータの位置制御性と重量(軽量)の関係にフォーカスした領域図です。
超音波モータは他のモータに比べ、軽量で高い位置制御性を持つという特徴を持ちます。
回転部の重量が軽いためイナーシャが小さく、駆動信号が停止すると瞬時に摩擦力により静止するため、精密な位置決めが可能です。(最終的な位置決め精度は外部のセンサ:エンコーダやポテンショメータと制御コントローラに依存します�)
超音波モータ
ステッピング
モータ
DCモータ

競合製品との比較




ピエゾソニックモータ
他社製超音波モータ
ステッピングモータ
DCモータ
磁場環境で利用可
電力ゼロで姿勢保持
同サイズでの力
位置決め精度
寿命(間欠動作)
1.2Nm
1.0Nm
0.8Nm程度
0.05Nm程度
制度 ± 0.045°
制度 ± 0.09°
制度 ± 0.36°
制度 ± 1.0°
6,000時間(間欠)
1,500時間
5,000時間
10,000時間
薄型
アクチュエータとしてのメリット
-
その1 ・・・ 低速・高トルク
-
その2 ・・・ 無通電時に高保力
-
その3 ・・・ 高応答性・高制御性
-
その4 ・・・ 小型・軽量
-
その5 ・・・ 動作音が静粛
-
その6 ・・・ 中空構造が可能
-
その7 ・・・ 非磁性対応




超音波モータ精密ステージ

小型搬送、割り出し装置
一般搬送装置、小型のXY搬送装置


MRI環境、精密位置決めロボット用モータとして最適
ステアリング機構
アクティブサポーター
超音波モータトルク計測器
研究機関での活用
- 小型・静穏・精密作業 -

ピエゾソニックモータの活用領域

医療機関での活用
- 精密・非磁性 -
工場での活用
- 保持トルク・精密 -



日常生活での活用
- サポート・補助 -
デジタル信号制御(USBアプリ)
超音波モータの制御方法
デジタル信号制御(USBアプリ)
お問い合わせはこちら
製品の仕様に関するご質問やお見積り依頼など、お気軽にお問い合わせください。また、日本パルスモーター様、極東貿易様、オリムベクスタ様から弊社製品をご購入いただけます。
電話でのお問い合わせ
03-6379-6020
営業時間
10 : 00~18 : 00
(土日祝 休み)
